Նավթի գծի սկզբունքը
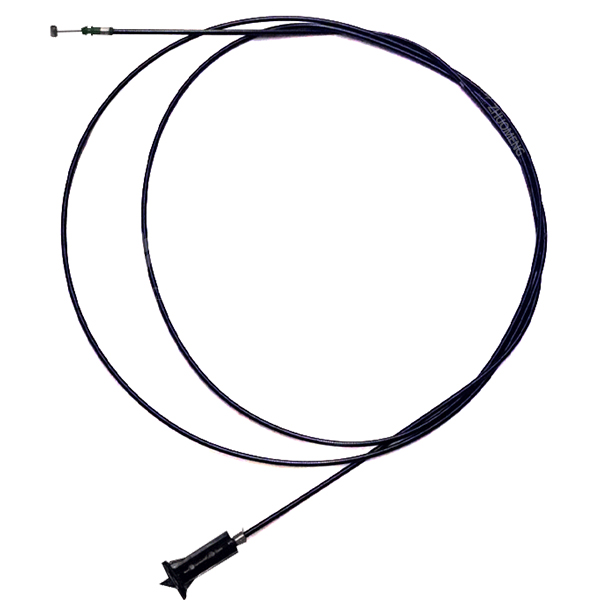
Ավանդական քաշող մետաղալարով գազը միացված է գազի ոտնակին պողպատե մետաղալարի մի ծայրով, իսկ մյուս ծայրում՝ գազի փականը։ Դրա փոխանցման հարաբերակցությունը 1:1 է, այսինքն՝ որքանով ենք մենք օգտագործում մեր ոտքերը գազի բացման անկյան վրա կանգնելու համար, այնքան էլ մեծ չէ, բայց շատ դեպքերում փականը չպետք է բացվի այդքան մեծ անկյան տակ, ուստի այս մրցաշրջանում փականի բացման անկյունը պարտադիր չէ, որ ամենագիտականը լինի, չնայած այս եղանակը շատ ուղիղ է, բայց դրա կառավարման ճշգրտությունը շատ ցածր է։ Իսկ էլեկտրոնային գազը մալուխի կամ լարերի միջոցով է գազի բացումը կառավարելու համար, մակերեսից ավանդական գազի գիծը մալուխով փոխարինելու համար, բայց ըստ էության դա ոչ միայն միացման պարզ փոփոխություն է, այլև կարող է ապահովել ամբողջ մեքենայի հզորության ավտոմատ կառավարման գործառույթ։
Երբ վարորդը պետք է արագացնի արագացուցիչը, ոտնակի դիրքի սենսորը կընկալի ազդանշանը մալուխի միջոցով դեպի ECU, ECU-ն վերլուծությունից, որոշումից հետո հրաման կտա շարժիչին, և շարժիչը կկառավարի գազի բացվածքը՝ այրվող խառնուրդի հոսքը կարգավորելու համար, մեծ ծանրաբեռնվածության դեպքում գազի բացվածքը մեծ է, այրվող խառնուրդը ավելի շատ է մտնում գլանի մեջ։ Եթե գազի բացվածքը կարգավորելու համար կարող եք հենվել միայն ոտքի վրա՝ գազի ոտնակի խորությունը բարձրացնելու համար, դժվար կլինի կարգավորել գազի բացվածքի անկյունը՝ տեսական օդ-վառելիք հարաբերակցության վիճակին հասնելու համար, և էլեկտրոնային գազի սենսորը կարող է տվյալներ հավաքել ECU սենսորի միջոցով՝ վերլուծելու, համեմատելու և գազի ակտիվատորի գործողության հրահանգներ տալու համար, գազի ոտնակը դնելով լավագույն դիրքի վրա։ Տարբեր բեռնվածությունների և աշխատանքային պայմանների դեպքում կարող է մոտ լինել 14.7:1 տեսական օդ-վառելիք հարաբերակցությանը, որպեսզի վառելիքը լիովին այրվի։
Էլեկտրոնային գազի կառավարման համակարգը հիմնականում բաղկացած է գազի ոտնակից, ոտնակի տեղաշարժի սենսորից, ECU-ից (էլեկտրոնային կառավարման բլոկ), տվյալների ավտոբուսից, սերվոշարժիչից և գազի ակտիվատորից: Տեղաշարժի սենսորը տեղադրվում է արագացուցիչի ոտնակի ներսում՝ ցանկացած պահի արագացուցիչի ոտնակի դիրքը վերահսկելու համար: Երբ հայտնաբերվում է արագացուցիչի ոտնակի բարձրության փոփոխություն, տեղեկատվությունը անմիջապես կուղարկվի ECU-ին: ECU-ն կհաշվարկի այլ համակարգերից ստացված տեղեկատվությունը և տվյալները և կհաշվարկի կառավարման ազդանշան, որը գծի միջոցով կուղարկվի սերվոշարժիչի ռելեին: Սերվոշարժիչը վարում է գազի ակտիվատորը, իսկ տվյալների ավտոբուսը պատասխանատու է համակարգի ECU-ի և այլ ECU-ների միջև հաղորդակցության համար: Քանի որ գազի լծակը կարգավորվում է ECU-ի միջոցով, էլեկտրոնային գազի համակարգերը կարող են կարգավորվել տարբեր գործառույթներով՝ վարորդական անվտանգությունն ու հարմարավետությունը բարելավելու համար, որոնցից ամենատարածվածներն են ASR-ը (քարշման կառավարում) և արագության կառավարումը (կռուիզ կառավարում):